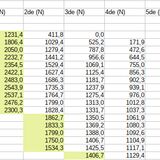
I wasn't referring to comparing bikes with one another, I was referring to the torque tables I made before for my own "just-for-fun" exercise. Based on these 2 tables from some days ago (the one of my own bike and the one of the K1300S), there is no extra dimension needed. The 2 tables from before showed torque values. So : expressed in Nm.
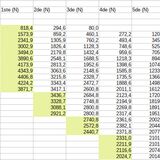
And to calculate from there the force, delivered at the back wheel (the "thrust", expressed in N),
if I didn't make any logical errors, the only extra calculations to be done are :
1. take the torque of the engine at that speed's rpm (in Nm) in that gear,
2. multiply it by all reductions of
the concerned gear, and
3. divide it by the (back) wheel's radius (in m). The result's unit dimension is then N.
So e.g. taking the 140Nm, delivered from the K1300S's engine in first gear at it's 100 km/hr's rpm ...
1. the torque is 140 Nm,
2. multiplied by 10.085 (being the primary reduction x secundary reduction x the first gear's reduction),
3. divided by the 0.32 m of the K1300S's back wheel (the value I used)
results in a force of 4406.8 N which is the maximum force the K1300S ever delivers at it's back wheel. Above this speed, the values only decrease.
This must be the number you were after initially, isn't it ?
Indeed, if you want to compare bikes to one another (which wasn't
my initial goal), you'd need to add a third dimension. But as from (rough guess) about 100 km/hr, everything will become very unreliable, as the force result will be significantly biased by aerodynamical drag if you ask me... Whereas below that speed, it's difficult to compare. E.g., the K1300S's performance time specs to get from 0 to 100 km/hr say "in under 2.8 seconds". So you'd need quite some precise chronometer